


كشفت مجموعة من الباحثين في معهد ETH زيورخ عن إنجاز تقني مذهل يتمثل في تطوير روبوت قادر على لعب الريشة الطائرة (البادمينتون) باستخدام الذكاء الاصطناعي. هذا الابتكار الجديد لا يُعتبر مجرد إنجاز ميكانيكي، بل خطوة متقدمة نحو ربط حركات الروبوتات بإدراكها البصري، مما يُقربها أكثر من مستوى ردود الفعل البشرية.
تجاوز الرشاقة: الحاجة إلى الإدراك السريع
شهدنا في السنوات الأخيرة تطورًا لافتًا في قدرة الروبوتات على أداء حركات معقدة بدقة وأناقة، كما هو الحال مع روبوتات شهيرة مثل Atlas وSpot وStretch. ومع ذلك، ظل هناك نقص في قدرة هذه الروبوتات على الاستجابة السريعة للمتغيرات البصرية كما يفعل البشر، كالتقاط كرة طائرة أو تفادي ضربة مفاجئة.
من هنا انطلق الدكتور يونتاو ما، الباحث في مختبر الأنظمة الروبوتية في ETH زيورخ، لقيادة مشروع يهدف إلى دمج الإدراك الحسي بالحركة البدنية في الروبوتات، من خلال تدريبها على رياضة تتطلب تفاعلًا لحظيًا وتناسقًا جسديًا عاليًا: رياضة الريشة الطائرة.
تصميم الروبوت ANYmal: من الصناعة إلى الرياضة
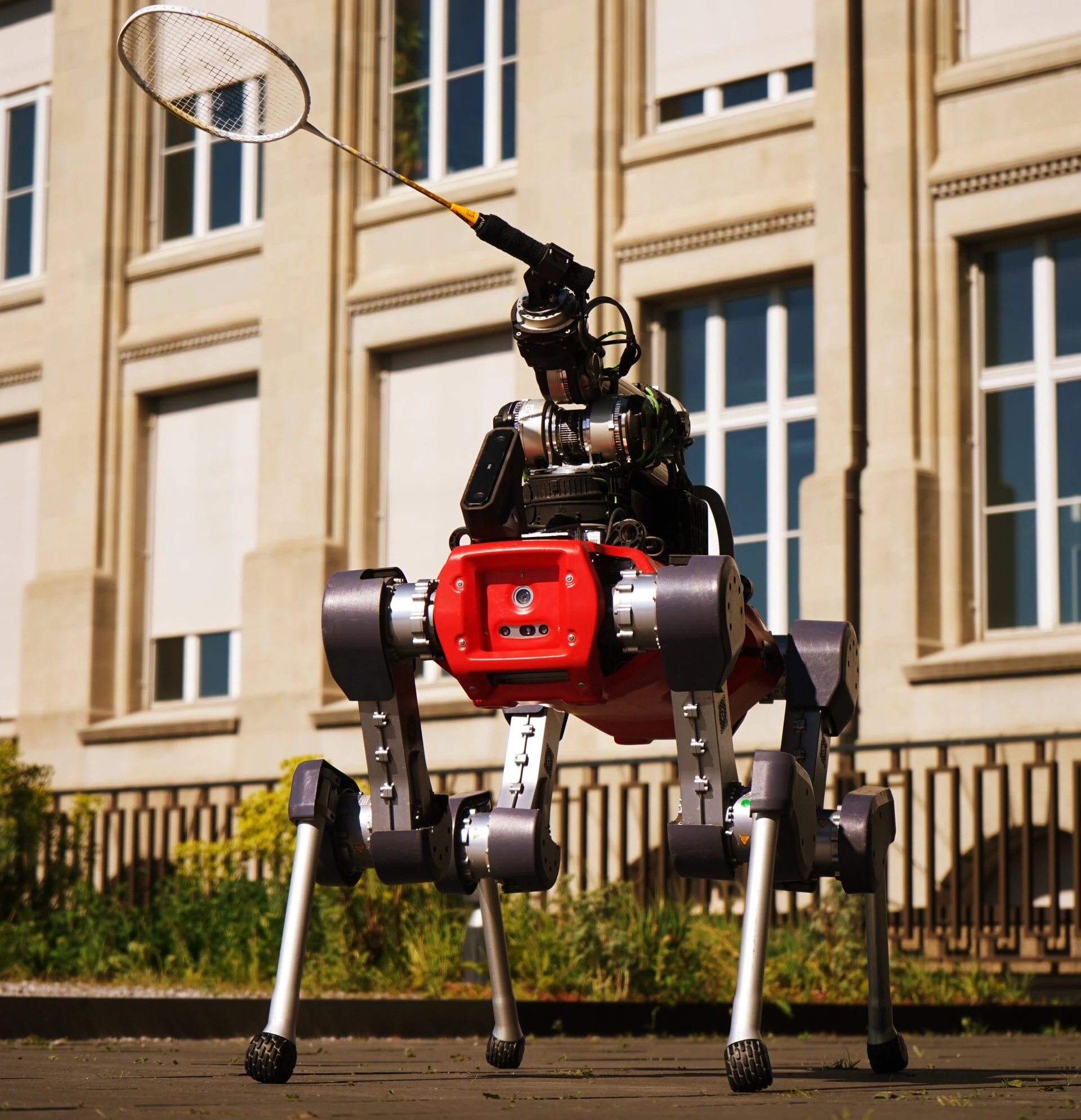
أطلق الفريق على الروبوت اسم ANYmal، وهو في الأصل منصة روبوتية رباعية الأرجل طُورت من قبل شركة ANYbotics السويسرية، وهي شركة منبثقة عن ETH وتُركز على تطبيقات الصناعة الثقيلة، خصوصًا في مجالات النفط والغاز. يبلغ وزن الروبوت حوالي 50 كيلوغرامًا، ويبلغ طوله أقل من متر، بينما يتراوح عرضه بنصف المتر تقريبًا.
للتمكن من ممارسة الريشة الطائرة، تم تزويد الروبوت بذراع آلية متعددة الحركات طورتها شركة Duatic، وهي بدورها شركة ناشئة من ETH. حُمل المضرب في فم الذراع بطريقة تبدو أشبه بزرافة صغيرة تمسك مضربًا بين أسنانها. زُوّد الروبوت بكاميرا استريو لتتبع حركة الريشة والتفاعل مع البيئة المحيطة.

ذكاء اصطناعي يتعلم من المحاكاة
لم يقتصر العمل على الجوانب الميكانيكية، بل قام الفريق أيضًا بتطوير منظومة تحكم تعتمد على التعلم المعزز. بدلًا من بناء نماذج رياضية معقدة لسلوك الروبوت، تم تدريب نسخة افتراضية من ANYmal داخل بيئة محاكاة رقمية، حيث مارس اللعب بشكل متكرر وتعلّم من أخطائه.
كانت التدريبات تُقسَّم إلى وحدات متكررة، وفي كل منها يُطلب من الروبوت التنبؤ بمسار الريشة وتنفيذ ست ضربات ناجحة متتالية. خلال هذا التدريب، لم يتعلّم الروبوت فقط كيفية الضرب، بل أيضًا كيف يقيّم قدراته البدنية وحدود تحمّله.
موازنة الرؤية بالحركة: تحدي كبير
واجه فريق التطوير تحديات معقدة في موازنة دقة الرؤية مع سرعة الحركة. عند تحرك الروبوت ببطء، تقل احتمالية صد الضربات، بينما تؤدي الحركة السريعة إلى اهتزاز الكاميرا وفقدان تتبع الريشة. ولحل هذا التحدي، تم تدريب نموذج إدراك بصري على بيانات حقيقية من الكاميرا، مما ساعد الروبوت على تعلّم كيفية تتبع الريشة حتى في ظروف ضوضاء بصرية.
بعد انتهاء مرحلة التدريب، أصبح الروبوت قادرًا على اتخاذ قرارات مشابهة لتصرفات اللاعبين البشر، مثل العودة إلى مركز الملعب بعد كل ضربة، أو الوقوف على رجليه الخلفيتين للحصول على رؤية أوضح. كما تعلّم كيفية تجنّب السقوط وتقييم المخاطر، وتجنّب المحاولات المستحيلة التي قد تؤدي إلى أضرار جسيمة.
الروبوت في مواجهة البشر: نتائج متواضعة
رغم كل هذه القدرات، لم يتمكن الروبوت من مجاراة اللاعبين البشر عند المواجهة الحقيقية. استغرقت استجابته حوالي 0.35 ثانية بعد كل ضربة من اللاعب البشري، بينما تبلغ سرعة استجابة البشر حوالي 0.2 ثانية في المتوسط، وقد تنخفض إلى 0.12 ثانية لدى الرياضيين المحترفين.
كما كانت كاميرته محدودة المجال، مما جعله يرى الريشة لفترة قصيرة فقط قبل أن يضطر للتحرك. ومع الضربات السريعة أو “السماتش”، تراجعت دقة الروبوت بشكل ملحوظ.
خطط مستقبلية وتطبيقات محتملة
لم يُصب الفريق بالإحباط، بل بدأ في تطوير أفكار لتحسين الروبوت، مثل إضافة كاميرات عالية السرعة بتقنية “الحدث”، والتي تسجل الحركة بزمن استجابة منخفض للغاية، بالإضافة إلى تحديث المُحركات لتكون أسرع وأكثر مرونة.
يرى الدكتور يونتاو ما أن هذا الإطار التدريبي لا يقتصر على الرياضة، بل قد يُستخدم في تطبيقات متعددة مثل الالتقاط الآلي للأشياء أو حتى رميها بدقة، مشيرًا إلى أن الهدف النهائي ليس صنع روبوتات رياضية للمنافسة، بل تطوير قدرات الإدراك الحركي لدى الآلات بشكل عام.
?xml>
